We may avoid this effect by storing the position of the servo in the non-volatile memory. Arduino allows us to access 512 registers (say, memory slots) that will survive while it is powered off, kind of storing the info in the hard disk drive of a computer.
The assembly and code below will move 20 degrees of a servomotor and store the end position every time the button is pushed. When the board is switched on, the servo is not moved to a default position but it first checks if there is a proper value in the EEPROM and if so, it will use that as the starting value for the servo.
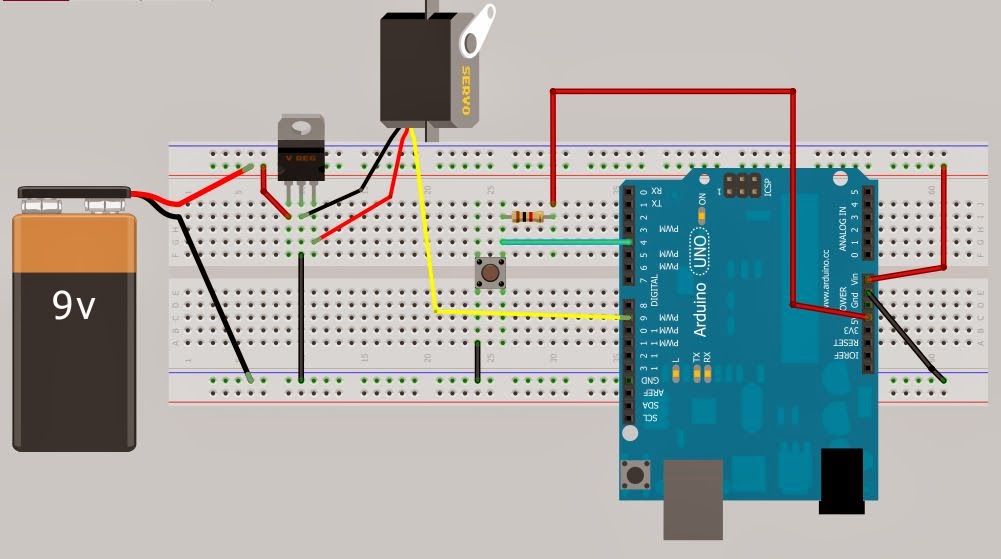
Electrically, the 9V battery feeds the Arduino power through Vin pin, and the servo through a 7805 voltage regulator. For a quick and dirty check, you may connect your servo to the Arduino 5V pin instead of using the voltage regulator, but I am always wary of using Arduino pins in power applications.
The pushbutton is pulled up to 5V through the 1k resistor and will yield a 0 to the digital pin #4 when pushed.
You will find more details and examples on how to manage non-volatile memory at the EEPROM libray description.
// SERVO_MEMORY // Controlling a servo position using a switch, will // turn moveDegrees every time the switch is pushed // and change the direction once it reaches the end. // The position is recorded in the non-volatile memory so the // position of the servo is kept if switched off an on. // by Carles Flotats, March 2014, after the servo, EEPROM // and fade examples #include <Servo.h> #include <EEPROM.h> Servo myservo; // create servo object to control a servo int switchPin = 4; // pin used to connect a pulled up button int val; // variable to store the servo position int moveDegrees=20; // degrees to turn for every button push int memoryPos=5; // memory slot to store the position void setup() { val=EEPROM.read(memoryPos); //read the stored position if (val < 20 || val > 160){ // if it is not a valid position val=20; // assign a default value } //Serial.begin(9600); pinMode(switchPin, INPUT); myservo.attach(9); // pin 9 controls the servo myservo.write(val); // moves to the stored position } void loop() { //Serial.println(digitalRead(switchPin)); while(digitalRead(switchPin)){ // wait for button pushed delay(10); } val=val+moveDegrees; // increase the position //Serial.println(val); myservo.write(val); // sets the servo position EEPROM.write(memoryPos, val); //stores the current position delay(500); // waits for servo to get there if (val == 20 || val == 160) { // if the servo is at the end moveDegrees = -moveDegrees ; // changes the movement direction } }

